PIC Microchip Microcontroller LED Turn Signal Flasher PIC16F872
This project we will make a LED turn signal flasher. I made this because I installed LED light bulbs in my car to save ware and tare on the alternator but a normal flasher will not flash LED bulbs. You can use whatever processor you want but I used a PIC16F872 because at work we discontinued using them at work and we upgraded to PIC16F886 so I can get these at a discounted price.
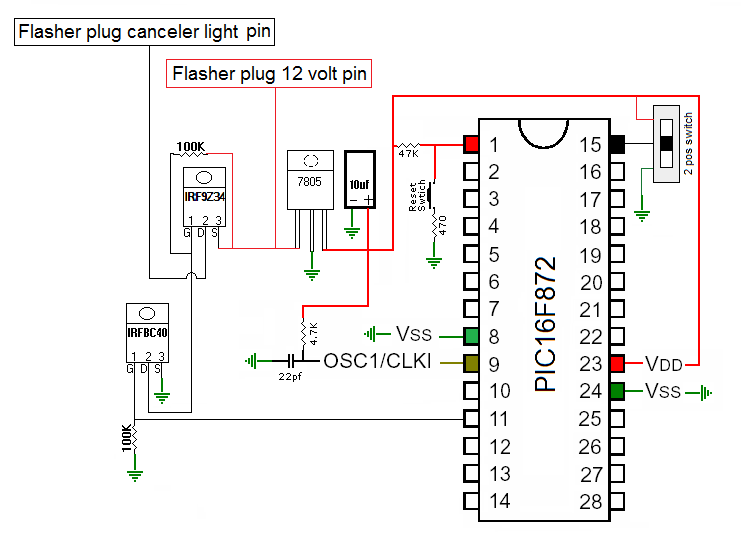
It’s a really simple circuit and it can be built differently but this is how I built it. The switch allows for two different modes on for normal flash and one for a quick triple flash. The connections are made at the flasher plug and a ground connection the output of the P-channel mosfet goes to the turn signal canceler side of the plug and the 12 volt power comes from the other side of the flasher plug and the a ground.
The MPASM Assembly code:
; 872-TurnSignal 5-3-16
; LED Turn Signal Flasher
; by Pete01507
; RB7 low = normal flash
; RB7 high = TFF flash "triple flash fast"
include "p16f872.inc"
__CONFIG _FOSC_EXTRC & _WDTE_OFF & _PWRTE_OFF & _CP_OFF & _BOREN_OFF & _LVP_OFF & _CPD_OFF & _WRT_OFF
errorlevel-302 ;removes error 302 during build
bank0 EQU 0x00
bank1 EQU 0x80
bank2 EQU 0x100
bank3 EQU 0x180
cblock 20h
delay1 ; Define 8-bit variables for the
delay2 ; delay loop: Delay1 and Delay2
endc
org 0h
banksel bank1 ; same as STATUS,5
movlw b'00000000' ; configure PORT C as output (1=input,0=output) bit order='76543210'
movwf TRISC ; moves your configuration of PORT C
movlw b'11111111'
movwf TRISB
banksel bank0 ; same as bcf STATUS,5
clrf PORTC
clrf PORTB
start
btfsc PORTB,7
goto ff
reg
bsf PORTC,0 ; sets PORTC,0 high
call delay ; call subroutine delay
call delay
call delay
bcf PORTC,0 ; sets PORTC,0 low
call delay ; call subroutine delay
call delay
call delay
goto start ; continous loop
ff
bsf PORTC,0
call delays
bcf PORTC,0
call delays
bsf PORTC,0
call delays
bcf PORTC,0
call delays
bsf PORTC,0
call delays
bcf PORTC,0
call delays
call delay
call delay
call delay
call delay
call delay
goto start
delay
movlw .255 ; use value .1 to .255 low numbers = fast large numbers = slower
movwf delay2
delayloop1
movlw .255 ; 255 is the maximum number
movwf delay1
delayloop2
decfsz delay1,f ; decrease file size skip if zero loops until 0 then skips next instruction
goto delayloop2 ; this is skipped until delay1 reaches 0 then this instruction is followed
decfsz delay2,f
goto delayloop1
return ; return from subroutine
delays
movlw .100 ; use value .1 to .255 low numbers = fast large numbers = slower
movwf delay2
delayloop11
movlw .100 ; 255 is the maximum number
movwf delay1
delayloop22
decfsz delay1,f ; decrease file size skip if zero loops until 0 then skips next instruction
goto delayloop22 ; this is skipped until delay1 reaches 0 then this instruction is followed
decfsz delay2,f
goto delayloop11
return ; return from subroutine
endThe components you will need. Most of the these can be substituted for equivalent components.
- Processor
- Processor socket
- PCB board
- 7805 voltage regulator
- 10uf capacitor
- 22pf capacitor
- PCB switch
- IRFBC40 N-channel MOSFET
- IRF9Z34 P-channel MOSFET
- 2- 100k resistors
- 1- 4.7k resistor
- 1- 47k resistor to pin 1 reset switch & 470 optional
- 2- male 1/4″ PCB spade connectors
- 1- 20ga wire for ground


{kind=link}